JNER:与社交机器人打游戏促进中风患者康复
时间:2021-09-19 20:31:20 热度:37.1℃ 作者:网络
伸手到握动作的协调性是中风后康复的主要功能目标之一,因为这个动作是大量日常活动的基础,例如伸手拿起杯子喝水。密集、重复的特定任务训,可以改善中风后的手臂功能。然而,需要大量重复的强化练习对患者和治疗师来说都是一个挑战。需要为长期康复设计可行的替代方法,以改善受损手臂的功能。为了让患者多次重复某项任务,他们必须具有高度的积极性和参与度。提高动机和参与度的方法之一是游戏化任务,游化已被证明可以通过成就和社会互动提高患者的动机、学习、信心和积极性。竞争性和合作性游戏化任务已被证明可以提高中风患者的积极性和运动强度。交互式机器人可以扮演竞争伙伴或教练的角色。社会辅助机器人(SARs)就是为此而设计的。然而,目前尚不清楚在与SAR的长期互动过程中,中风患者的积极性和康复功能水平如何变化。

本文工作中的目标有三个:第一,建立一个功能性卒中后康复平台,该平台可以跟踪患者在一段时间内的表现。更具体地说,通过社交辅助机器人或计算机屏幕向患者提供指令和反馈。其次,对中风患者进行可用性研究。第三,在对平台进行长期干预(在5-7周内进行15次锻炼)后,测量患者使用该平台锻炼的意愿,并测试参与者在使用SAR配置时与使用计算机配置时使用该系统的意愿的差异。

开发了一个用于中风上肢康复的游戏化平台。该平台可用于两种配置中的一种:在一种配置中,患者接收来自仿人机器人的游戏指令和反馈(机器人配置;我们使用了Pepper机器人,软银机器人Aldebaran),另一种是从标准计算机屏幕。当信息被描述为在机器人的平板电脑屏幕上显示时,信息也在计算机配置中显示在计算机屏幕上;当机器人发出音频指令时,屏幕上的扬声器发出与计算机配置完全相同的指令。音频指令总是伴随着屏幕上的文本和相同的指令:这些指令在机器人状态下显示在机器人的平板电脑屏幕上,在计算机状态下显示在计算机屏幕上。
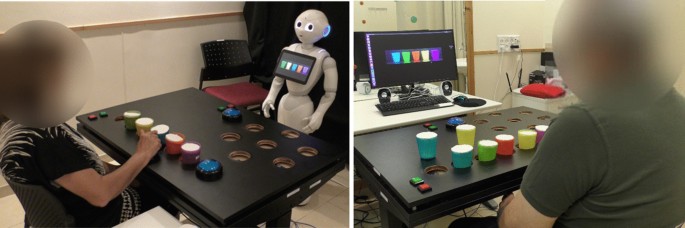
电脑和社交机器人游戏模式
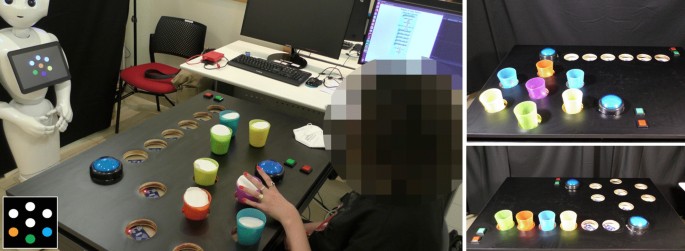
在开发的七套器械训练中,每一套中,患者都使用诸如杯子、罐子、钥匙、钱包和抽屉等真实的日常物品来练习伸手抓握和放置,或伸手抓握和操纵动作。这些功能训练集使患者能够练习运动和认知能力。在每个练习集中,有四到七个难度级别,难度级别是以下因素的函数:(i)参与者在每次试验中操纵的对象数量(他们从少量对象开始,然后逐步操纵更多对象),(ii)这些物体的重量(从拾取和放置轻质物体开始,然后逐渐增加到较重的物体),(iii)放置物体的桌子或架子的高度(从操作标准桌子高度(75 cm)或更低的物体开始,然后逐渐增加到肩部高度,作为他们能力的函数)。其中三套练习用于练习伸手抓取和放置动作,另外四套练习用于练习伸手抓取和操作。在每个练习集中,对参与者的说明表明他们应该只使用受损的手还是双手来完成任务。所有物体和平台表面分别配备有标签和传感器,用于跟踪物体的末端位置。
患者按照机器人提供的指令玩目标游戏
总共有24名参与者被随机分配到机器人(11名参与者)或计算机(13名参与者)干预组。由于新冠肺炎,门诊康复中心于2020年3月中旬至2020年5月中旬关闭。当时,有四名参与者正在进行干预。因此,这些参与者无法继续参与干预计划,被排除在研究之外。由于这个原因,机器人组的一名男性参与者在四次干预后被排除在外。计算机组的五名参与者没有完成干预。其中三人被排除在外,因为新冠病毒-19定中断了干预方案。其中一名男性在此之前已经完成了七次干预,两名女性已经完成了四次和九次干预。此外,两名妇女退出了计算机组,因为她们不想继续进行干预。一名40岁妇女参加了四次干预,一名59岁妇女参加了八次干预。机器人组中没有一个参与者退出了自己的研究。

厨房游戏
“您认为该系统有助于上肢康复吗?机器人组问题的平均分为4.1分 ,计算机组得分3.9分 。 对于“你喜欢使用这个系统吗?”这个问题,机器人组的参与者平均得分为4.3分 ± 1.3,而计算机组为4.0 ± 0.8。当被问及“你愿意在康复过程中继续使用该系统吗?”机器人组的参与者平均得分为4.3分 ,计算机组的平均得分为3.6分 ,在比较两组的经验时,尽管机器人组的所有参数评分都较高,但两组之间对任何USEQ(用户满意度调查问卷)问题的评分在统计学上没有显著差异。我们发现FMA定义初始损伤水平与参与者对系统对其上肢(rs)贡献的评估之间没有相关性。参与者对该系统对其康复的贡献的评估与他们继续使用该系统进行训练的意愿之间存在很强的相关性。
参与者之间对于他们更喜欢锻炼计划的哪些方面没有明确的一致意见。18人中有14人(78%)提到他们喜欢任务的运动方面,18人中有11人(61%)提到他们喜欢增加认知挑战(记忆和空间感知)。18名参与者中有9名(50%)表示,他们最喜欢的运动游戏是逃生室,因为它包括运动任务和思维挑战;参与者注意到这就像是在解谜语。两名与会者指出,他们认为该报告太短,他们希望在报告中增加更多的任务。八名参与者(44%)提到他们喜欢所有的运动游戏。
18名参与者中有13名(72%)提到他们喜欢游戏的多样性和双重任务认知挑战的增加。三名参与者(17%)表示他们更喜欢到达-抓取和放置任务游戏,三名参与者表示他们更喜欢到达-抓取和操纵游戏,这需要操纵物体(游戏3、4、6和7)。重要的是,5名参与者(28%)表示,他们希望有更多种类的运动游戏,以便在每节课中都有一种新的游戏。此外,六名参与者(33%)提到,他们将在运动控制(例如,更重的体重,更高的游戏水平)和认知需求(例如,更多谜语)方面享受更具挑战性的任务。最后,四名参与者(22%)表示,他们希望有一个系统能够自动检测他们的运动和认知能力以及他们的表现,并根据他们的运动和认知表现亲自调整培训水平和反馈。来自机器人小组的两名参与者提到,他们希望机器人的穿着更像人类。两组的参与者都报告说,该康复平台满足了他们的手臂康复需求,他们表示即使在研究结束后也希望继续使用该平台进行训练。我们发现机器人组的参与者在所有参数上对系统的接受度都有提高的趋势。
本文展示了在临床环境中使用该平台对卒中后患者进行长期康复的可用性。在这种互动后,患者对两种平台配置的接受程度都很高,对SAR配置的评价也更高。我们表明,不仅仅是技术的使用增加了人们练习的动机,而是对技术的有效性及其对康复过程的感知贡献的欣赏。此外,我们还提供了一份指南清单,可用于设计和实施其他康复技术工具。
Feingold-Polak, R., Barzel, O. & Levy-Tzedek, S. A robot goes to rehab: a novel gamified system for long-term stroke rehabilitation using a socially assistive robot—methodology and usability testing. J NeuroEngineering Rehabil 18, 122 (2021). https://doi.org/10.1186/s12984-021-00915-2

